
Presentación de Juan Antonio Fernández Montaña en la que hace un recorrido muy detallado sobre lo que es hoy día la Radioafición. Está presentación fue elaborada para la Semana Cultural y Científica de Abril de 2020 del IES Pedro de Valdivia, que no llegó a celebrarse por la suspensión de actividades debida al COVID-19. Juan Antonio ha tenido la deferencia de grabar la narración para hacer la presentación en vídeo.
Pepe Pineda
Magnetómetro
¿QUÉ ES UN MAGNETÓMETRO?
Un magnetómetro sirve para cuantificar en fuerza o dirección de la fuerza electromagnética de la Tierra.
Hay distintos tipos de magnetómetro que son:
- Los magnetómetros escalares que miden la fuerza magnética de en las que están sometidos.
- Los magnetómetros vectoriales que tienen la capacidad de medir el componente del campo magnético en una dirección particular, en este caso el norte magnético de la Tierra.
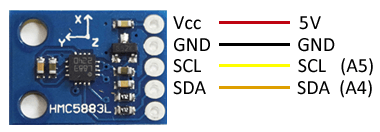
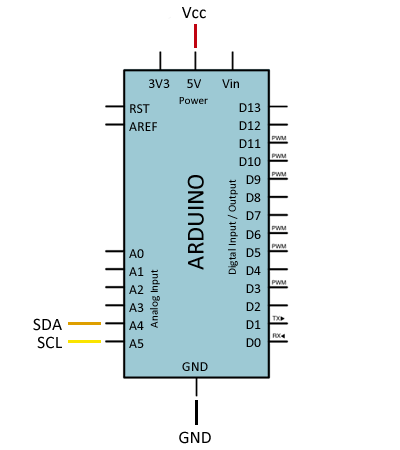
CÓMO MONTARLO.
El montaje de esta brújula magnética es muy sencillo solo tienes que alimentarlo con su propia toma de tierra y la conexión 5V, también hay conexiones de programación que son la SDA que va al pin A4 y la conexión SCL que va al pin A5.
PROGRAMACIÓN.
//GND – GND
//VCC – VCC
//SDA – Pin A4
//SCL – Pin A5
#include «Wire.h»
#include «I2Cdev.h»
#include «HMC5883L.h»
HMC5883L compass;
int16_t mx, my, mz;
void setup()
{
Serial.begin(9600);
Wire.begin();
compass.initialize();
}
void loop()
{
//Obtener componentes del campo magnético
compass.getHeading(&mx, &my, &mz);
Serial.print(«mx:»);
Serial.print(mx);
Serial.print(«tmy:»);
Serial.print(my);
Serial.print(«tmz:»);
Serial.println(mz);
delay(100);
}
//GND – GND
//VCC – VCC
//SDA – Pin A4
//SCL – Pin A5
#include «Wire.h»
#include «I2Cdev.h»
#include «HMC5883L.h»
HMC5883L compass;
int16_t mx, my, mz;
//declinacion en grados en tu posición
const float declinacion = 0.12;
void setup()
{
Serial.begin(9600);
Wire.begin();
compass .initialize();
}
void loop() {
//Obtener componentes del campo magnético
compass .getHeading(&mx, &my, &mz);
//Calcular ángulo el ángulo del eje X respecto al norte
float angulo = atan2(my, mx);
angulo = angulo * RAD_TO_DEG;
angulo = angulo – declinacion;
if(angulo < 0) angulo = angulo + 360;
Serial.print(«N:»);
Serial.println(angulo,0);
}
SENSOR DE ULTRASONIDOS
–DEFINICIÓN:
Un sensor de ultrasonidos es un detector de proximidad que trabaja libre de roces mecánicos y que detectan objetos a distancias desde centímetros hasta algunos metros, este funciona enviando una onda de sonido y mide el tiempo que tarda en llegarle esa misma onda de sonido, y que haciendo algunas cuentas lo transforma a centímetros.metros, este funciona enviando una onda de sonido y mide el tiempo que tarda en llegarle esa misma onda de sonido, y que haciendo algunas cuentas lo transforma a centímetros.

– ESTUDIO COMERCIAL:
Actualmente este sensor ronda con un precio en el mercado de 1€. El más barato que he visto ha sido en Aliexpress, donde su precio es de 0,58€.El más barato que he visto ha sido en Aliexpress, donde su precio es de 0,58€. https://es.aliexpress.com/item/690139020.html
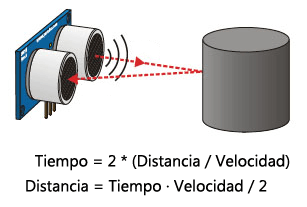
–FUNCIONAMIENTO:
El sensor se basa simplemente en medir el tiempo entre el envío y la recepción de un pulso sonoro. Sabemos que la velocidad del sonido es 343 m/s en condiciones de temperatura 20 ºC, 50% de humedad, presión atmosférica a nivel del mar. Transformando unidades resulta
343m/s·100cm/m
Es decir, el sonido tarda 29,2 microsegundos en recorrer un centímetro. Por tanto, podemos obtener la distancia a partir del tiempo entre la emisión y recepción del pulso mediante la siguiente ecuación.

El motivo de dividir por dos el tiempo (además de la velocidad del sonido en las unidades apropiadas, que hemos calculado antes) es porque hemos medido el tiempo que tarda el pulso en ir y volver, por lo que la distancia recorrida por el pulso es el doble de la que queremos medir.
–SISTEMA ELÉCTRICO:
- Directamente a los pines
- EchoPin = 2;
- TriggerPin = 4;

- Montaje en protoboard

–NUESTRO CÓDIGO:
//___________________ AQUI EMPIEZA EL PROGRAMA DEL ROBOT ______________________
{
// avanza(100); //avanza 100cm
// para(3); //para 3segundos
// retrocede(100); //retrocede 100cm
// para(3);
// izquierda(90); //Gira izda 90º
// para(3);
// derecha(90);
para(3);
siguelinea (600); //sigue linea 500cm
if (estado == 1) {
estado = 0;
obstaculo(); // hace esto si paró por obstáculo
}
if (estado == 2) {
estado = 0;
lineaNegra(); // hace esto si paró por linea negra
}
para(5);
}
//___________________ AQUI TERMINA EL PROGRAMA DEL ROBOT ______________________
void avanza(int D)
{
digitalWrite(pinIN1, HIGH);
digitalWrite(pinIN2, LOW);
analogWrite(pinENA, speedAI);
digitalWrite(pinIN3, HIGH);
digitalWrite(pinIN4, LOW);
analogWrite(pinENB, speedAD);
veMidiendo(millis() + (D * mscmA)); // mide hasta T
}
void veMidiendo (int T) {
while (T > millis()) {
pong = ping();
if (pong < distSeg) {
estado = 1;
break; // si distancia menor a la de seguridad termina
}
}
// Serial.println(pong);
int ping()
{
long duration, distanceCm;
digitalWrite(TriggerPin, LOW); //para generar un pulso limpio ponemos a LOW 4us
delayMicroseconds(4);
digitalWrite(TriggerPin, HIGH); //generamos Trigger (disparo) de 10us
delayMicroseconds(10);
digitalWrite(TriggerPin, LOW);
duration = pulseIn(EchoPin, HIGH); //medimos el tiempo entre pulsos, en microsegundos
// distanceCm = duration * 10 / 292 / 2; //convertimos a distancia, en cm
return duration;
}
estado = 1;
break; // si distancia menor a la de seguridad termina
}
// Serial.println(pong); // Serial.print('\t'); // para depuración
uint16_t position = qtr.readLineBlack(sensorValues); // 0=Izda a 5000=Dcha
void obstaculo() {
mueveServo();
}
Laboratorio de mecatrónica

Por fin empezamos a ver lo que el curso que viene convertiremos en nuestro espacio de trabajo principal. Todavía habrá que sacar trastos, limpiar, planificar el espacio, instalar equipos… Estas serán nuestras próximas tareas.



Impresión 3D. Test2



Imprimimos un archivo de referencia en impresión 3D «Benchy» para evaluar la calidad de nuestra impresora y determinar los mejores parametros de funcionamiento.
Impresión 3D. Coche solar









Iván ha diseñado el chasis de su vehículo solar para fabricarlo en la impresora 3D, aunque el diseño era bueno, ajustamos los parametros de impresión para conseguir la máxima velocidad de trabajo y esto hace que los acabados no sean los mejores, la superficie de la pieza quedo un poco irregular y la adherencia entre capas resultó un poco débil.
Iván también explico a sus compañeros el proceso de diseño de las distintas partes del chasis.
Arduino. Two blinking LEDs








Ejercicio de iniciación a la programación con Arduino.
Paneles difusores de sonido






Sin tornillos ni herramientas… 
hacen todo lo que inventan. 

Se ve bonito, pero huele…








Con nuestra fresadora CNC hemos construido unos arcos preforados de contrachado que han servido de estructura para unir unos tubos de cartón (embalaje de flurescentes LED) y formar un panel ondulado. Estos paneles los instalamos bajo el techo del estudio de radio y rompen el frente de las ondas de sonido lo que amortigua resonancias.
A la escucha de la Estación Espacial Internacional








Mientras esperamos ser seleccionados para un contacto directo con los astronautas embarcados en la Estación Espacial Internacional (conocida por sus siglas en inglés ISS), seguimos con el desarrollo del sistema de comunicaciones necesario y con actividades de escucha de las señales emitidas por la ISS. Hoy mismo hemos escuchado en directo al astronauta canadiense David Saint-Jacques contestando a las preguntas que le realizaban los alumnos del CEIP Nuestra Señora del Carmen (Sevilla) a los que veíamos simultáneamente a través de su canal en Youtube.
Impresión 3D. CAD II






En los procesos de fabricación automática (CAD/CAM) el diseño por ordenador de las piezas es el primer paso imprescindible para obtener los archivos de comandos que controlarán las maquinas de fabricación.