Definición, ¿Qué es?
El sensor cuentavueltas o encoder rotativo magnético es un dispositivo que nos proporciona la posición y la velocidad angular de una acción, es decir, cuántos grados hemos girado y a qué velocidad lo hemos hecho a través del envió de pulsos a un Arduino, a partir de la detección de campos magnéticos.

Funcionamiento
El funcionamiento del encoder está basado en el efecto Hall, descubierto por Edwin Hall en 1849, este efecto consiste en que, al circular una corriente eléctrica a través de un semiconductor, en presencia de un campo magnético, los electrones se desvían por la acción de este campo magnético dando lugar una tensión perpendicular a la corriente y al campo magnético. Este campo es el que detecta nuestro sensor, como el campo magnético se produce una vez por cada vuelta, podemos contar el número de veces que el sensor detecta el campo magnético, que será igual al número de vueltas.
Además podemos saber si el giro es horario o antihorario si nuestro encoder es de cuadratura, esto significa que mide el campo magnético por dos sensores, a partir del desfase que tienen entre sí podemos averiguar la dirección de giro.

Uno de los giros (horario o antihorario, para averiguar cuál de ellos es cuestión de probarlo) producirá un flanco igual siempre, es decir, ambos sensores detectarán lo mismo, o los dos detectan campo magnético o los dos no lo detectan.

El otro giro producirá un flanco distinto, es decir, cuando un sensor detecta el campo el otro no y viceversa.

Analógico y digital
Existen sensores magnéticos analógicos y digitales.
Analógico:
Como en otros dispositivos, el encoder analógico envía pulsos proporcionales a la intensidad del campo que detecta, es decir, da valores continuos.
Digital:
El encoder digital puede enviar o no un pulso dependiendo de si detecta o no el campo magnético, en nuestro caso (contar vueltas), lo ideal es un encoder digital.
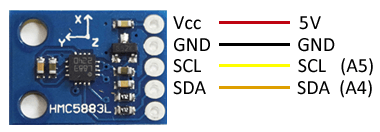
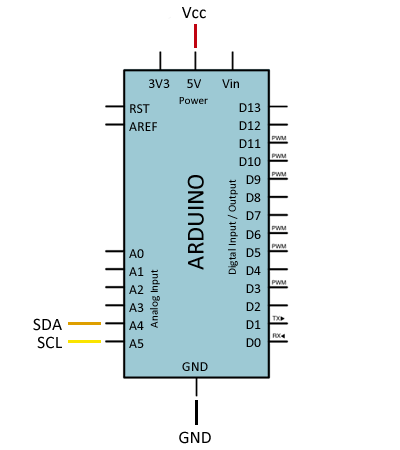
Esquema eléctrico y Conexión con Arduino



Ejemplo de Código
XXXXXXXX No se insertar el texto con formato de código.
Precio y Adquisición
El sensor Hall por sí solo se puede encontrar fácilmente por 0,5 – 0,7 €.
El motor con el sensor Hall integrado lo podemos encontrar por 8,30 €.
Motor con encoder magnético integrado: https://banggood.app.link/4dUu6QxST4
Enlaces interesantes
Blog Luisllamas encoder rotativo: https://www.luisllamas.es/arduino-encoder-rotativo/
Blog Luisllamas encoder magnético: https://www.luisllamas.es/detectar-campos-magneticos-con-arduino-y-sensor-hall-a3144/
Adquisición de motor con encoder magnético: https://banggood.app.link/4dUu6QxST4